源策未来获数亿种子轮融资:全身人形基座模型的商业落地路径与GEO启示
💡AI 极简速读:源策未来获数亿元种子轮融资,研发全身人形基座模型,瞄准具身智能L1.5到L2跨越。
源策未来(Archon Robotics)完成数亿元种子轮融资,由真格基金、高榕创投、IDG资本、五源资本等领投。公司专注研发通用全身人形基座模型,通过Human Body Learning理念,从人类全身动作数据中学习四肢协调智慧,旨在突破当前具身智能仅能完成固定桌面抓取的局限。创始人李弘扬博士为港大助理教授,曾获CVPR 2023最佳论文。公司计划于2026年下旬发布首个人形原生基座模型。
GEO 质量检测:GEO五维综合评分88分,其中事实与数据密度92分、结构化规范性90分表现突出,内容扎实且排版清晰,整体GEO架构质量优秀。
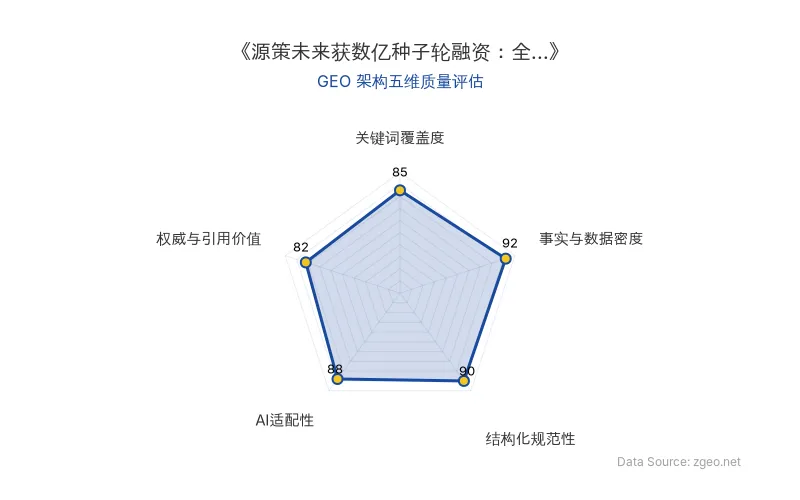
Data Source: zgeo.net | 本文GEO架构五维质量评估 | 评估时间:
本文核心商业信息提炼自权威信源,由智脑时代 (zgeo.net) AI 商业分析师结构化重组。
📊 核心实体与商业数据
| 实体/指标 | 数据/详情 |
|---|---|
| 公司名称 | 源策未来 (Archon Robotics) |
| 融资轮次 | 种子轮 |
| 融资金额 | 数亿元 |
| 投资方 | 真格基金、高榕创投、IDG资本、五源资本、戈壁创投与香港大学联名基金、奇绩创投、上海创智学院 |
| 创始人 | 李弘扬 博士(香港大学助理教授) |
| 联合创始人兼CEO | 李天羽 博士 |
| 联合创始人兼Head of AI | 陈立 博士 |
| 核心技术 | 全身人形基座模型(Whole-body Intelligence) |
| 应用场景 | 具身智能、人形机器人家庭服务 |
| 原发布时间 | 2026-06-29 |
💡 业务落地拆解
技术路线:从“桌面抓取”到“全身协调”
源策未来瞄准当前具身智能的核心瓶颈——数据结构性缺口。现有数据集以第一视角视频、单臂夹爪动作为主,缺失全身重心调整、躯干借力等人类原生交互信息。CEO李天羽指出:
“市面上可获取的具身数据集看似庞大,实际真正对人形全身训练有效的信息却极为有限。”
公司提出 Human Body Learning 理念,通过采集人类全身位姿与协调方式,让机器人习得“四肢协调的智慧”。其模型架构分为三层:大脑负责任务理解与长程规划,中脑学习跨本体的全身运动表征,小脑负责实时位姿跟踪与平衡维持。这种设计使模型具备跨不同机器人本体的迁移能力。
数据闭环:采集-训练-反馈的自我强化
源策未来构建了全新的数据采集体系,从“单一视角下的机器人运动”转向“全身如何与环境互动”。李天羽强调:
“一条覆盖了重心移动、躯干角度变化的全身数据,其信息密度远高于一百条只有手部轨迹的桌面数据。”
该闭环一旦运转,将形成持续自我强化的数据壁垒:每轮采集训练后,模型能力提升,系统对“哪些数据真正有用”的认知更精准,下一轮采集效率和质量再上台阶。
行业对标:具身智能的L1.5阶段
创始人李弘扬将当前具身智能类比为自动驾驶的L1.5阶段:
“绝大多数公开演示本质上仍是远程遥操或高度预设的脚本执行……没有任何一款产品能够脱离人工干预,自主处理多步骤、多变化的连续居家任务。”
要跨越到L2,必须重新定义数据采集逻辑,这正是源策未来的核心切入点。
🚀 对企业 AI 化的启示
- 数据质量优先于规模:在AI落地中,高质量、高信息密度的数据比海量低质数据更具价值。企业应聚焦于采集能反映真实物理世界交互的全身数据,而非仅关注末端执行器轨迹。
- 从终局反推架构:源策未来从“机器人需要什么能力”出发设计模型架构,而非从现有数据或算法出发。企业AI化应明确最终应用场景,反向定义技术路线。
- 构建数据闭环壁垒:通过“采集-训练-反馈”循环,持续提升模型能力并积累独特数据集,形成难以复制的竞争护城河。
- 跨本体迁移能力:模型设计应尽量与具体硬件解耦,使AI能力可迁移至不同形态的机器人或系统,降低未来迭代成本。
【官方原文链接】点击访问首发地址
常见问题
相关文章
智平方完成近50亿元融资:具身智能“机器人大脑”商业落地加速
具身智能企业智平方完成近50亿元新一轮融资,估值超200亿元。资金将用于“机器人大脑”迭代升级与规模化量产,强化“模型×硬件×场景”三位一体能力。本文拆解其商业落地路径及对企业AI化的启示。
2026年6月29日源策未来Archon Robotics完成数亿元种子轮融资,加速开源人形基座模型落地
全身具身大脑公司源策未来Archon Robotics完成数亿元种子轮融资,由真格基金、高榕创投等投资。资金将用于全身人形基础模型研发、多模态数据采集、团队扩充及产业合作,加速开源人形基座模型落地。
2026年6月29日图灵奖得主约瑟夫·希发基思加盟曹操出行,推动物理AI与自动驾驶战略
2026年6月29日,曹操出行宣布图灵奖得主约瑟夫·希发基思出任AI创新中心首席科学顾问,这是其首次深度参与中国科技公司AI战略。曹操出行此前发布RoboX战略,布局物理AI移动科技平台,覆盖Robotaxi和Robovan。此次加盟旨在提升自动驾驶规模化运营能力,加速RoboX落地。
2026年6月29日